


Guidance, Navigation and Control Laboratory (GNCLab) and Computational Laboratory (CompLab)
| GNCLab location |
| Via Claudio 21, Building 11 (ground floor) |
| CompLab location |
| Piazzale Tecchio 80 (6thfloor) |
| GNCLab Contacts |
| Domenico Accardo - Tel:+390817682149; Tel/Fax:+390817683365 E-mail: domenico.accardo@unina.it Giancarmine Fasano - Tel:+390817682361; Tel/ Fax:+390817683365 E-mail: giancarmine.fasano@unina.it |
| CompLab Contacts: |
| Giancarlo Rufino - Tel.: +390817682159; Tel/Fax: +390817682160 E-mail: giancarlo.rufino@unina.it Michele Grassi - Tel.: +390817682217; Tel/Fax: +390817682160 E-mail: michele.grassi@unina.it |
| Research Activities |
|
The following research activities are conducted at the above mentioned laboratories:
These activities are carried out within several projects funded by MIUR, ASI, Regione Campania, CIRA, PNRM and national Industries and research centers. |
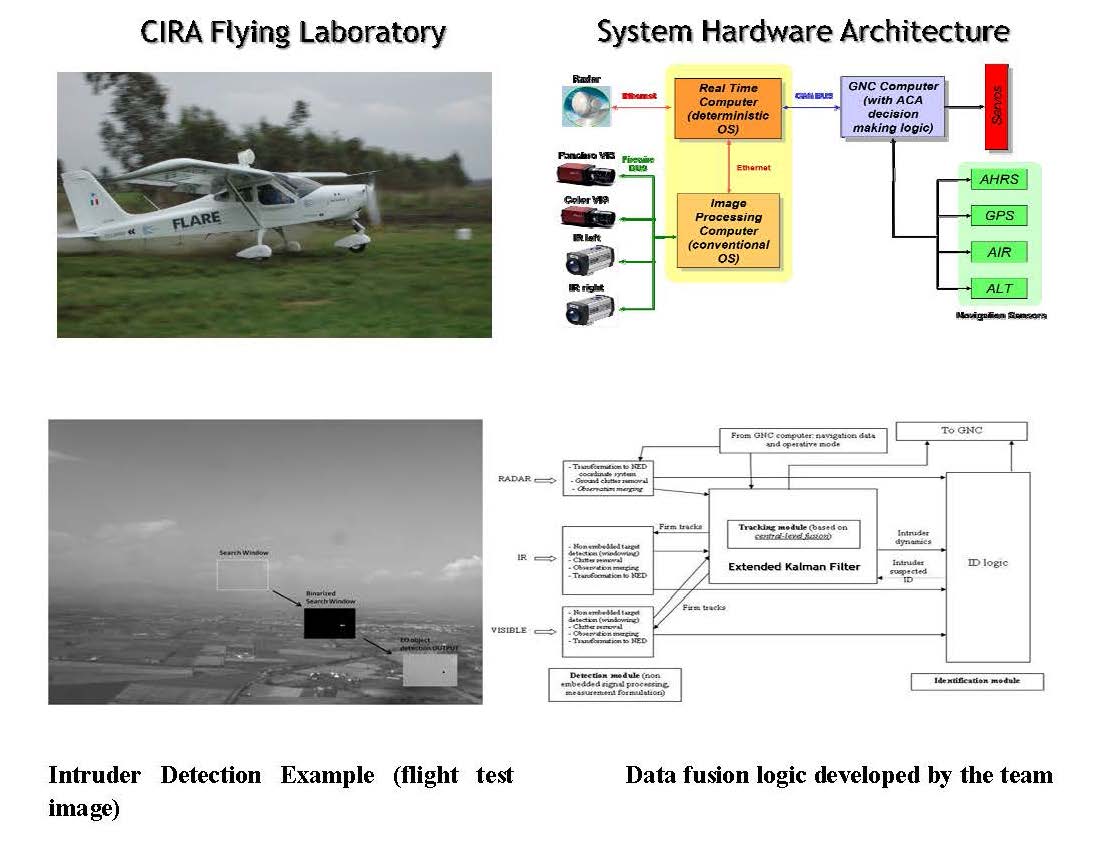
Development of an All-Weather and All-Time Sensing System to provide Autonomous See and Avoid capabilities to UAVs (Project CIRA-TECVOL).
The project was aimed at:
- designing a prototype system for Autonomous Collision Detect Sense and Avoid based on an airborne Radar, four Electro-Optical sensors, and two processing units (see flow-diagram in the figure below)
- developing the relevant real-time sensor data fusion software for airborne obstacle detection and tracking
- participating in the flight test campaign performed with a VLA manned aircraft named FLARE owned by CIRA.
Results achieved by this project were cited in Aerospace America (issue of December 2008 entitled "2008 year in review") in the article "Sensor Systems"
In the context of the autonomous flight technologies it is worth mentioning also the following projects:
- Development of a real-time navigation system to assist Autonomous UAV Takeoff and Landing (Project CIRA-ATOL)
- Development of “1st” small UAV platform for airborne remote sensing of fire hazards (In cooperation with AMRA Excellence Center)
- Development of a GN&C system and a video-link for a miniUAV to be integrated in a Netcentric C2 system (Project SELEX-SI – SISTS)
- Advanced CDGPS/INS test system for measuring AHRS performance (in cooperation with GMA Axitude s.r.l.)
- Study on Hybrid Airborne and Spaceborne Bistatic Radar System for UAS navigation (funded by ESA)
- Study on vision-based guidance and navigation algorithms for UAS/general aviation aircraft (Project CIRA-MISE)
Development of a compact airborne SAR (miniSAR) able to operate on-board a small aerial platform (cooperation with CO.RI.S.T.A.)

It is a compact airborne interferometric X-band SAR with high spatial and altimetric resolution, able to operate on-board a small aerial platform (see Figure on the side). MiniSAR is mainly finalized for production of technical topographic maps and for monitoring evolution of landslides events, assessing their extension and risk areas. MiniSAR is a research program co-funded by the Italian Ministry for University, Education and Research (MIUR).

Development of Aircraft Flight Trajectory Prediction tool for an enhanced Flight Data Processing (eFDP) system (cooperation with Selex SI)
The aim of this project was to develop a software tool for fast prediction of aircraft trajectories to set up an enhanced flight data processing system. The project wascarried within the Single European Sky ATM Research (SESAR) Program, which will provide advanced technologies and procedures with a view to modernizing and optimizing the future European ATM network.
The tool has been registered with an International Patent by Selex SI S.p.A. (patent no. US20120158220A1). See: http://www.google.com/patents/US20120158220
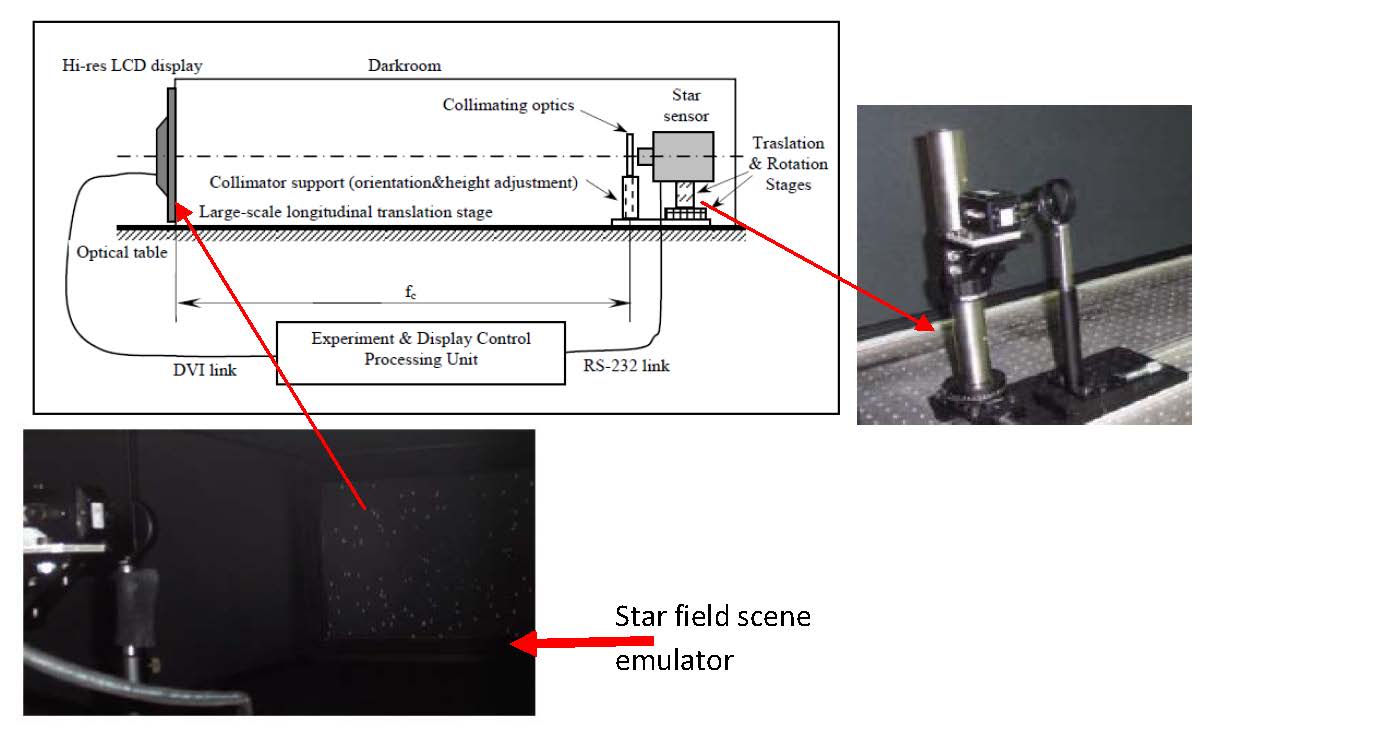
COTS-based Star sensor prototype design and test (funded by MIUR and Regione Campania, supported by Carlo Gavazzi Space)
The aim of the project was to develop and test a miniature, low-cost star sensor prototype based on COTS (Commercial Off The Shelf) components for microsatellite applications. Both the sensor prototype and the related testing facility were entirely developed at the laboratory (see figures below). The testing facility allows to simulate and acquire star field scenes according to a pre-planned sensor dynamics by means of a high-resolution monitor.
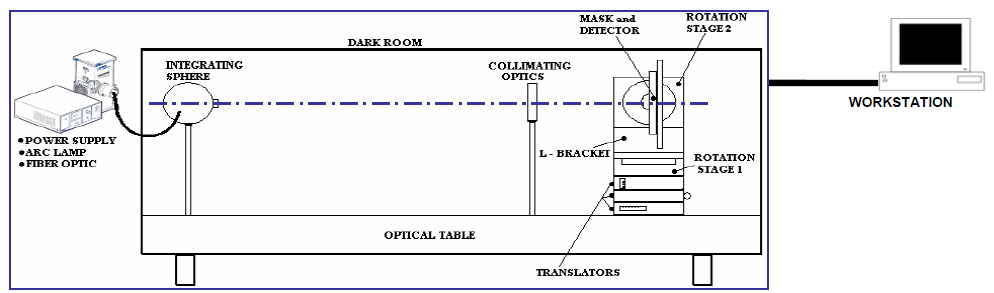
APS-based Micro Sun Sensor prototype design and test (project funded by ASI)
The aim of the project was to develop and test a miniature, low-cost sun sensor prototype based on COTS (Commercial Off The Shelf) components and CMOS technology for microsatellite applications. A prototype of the sensor was designed to be tested in orbit during the ASI-funded MIOSat mission (MIcroSatellite-based Optical mission). Both the sensor prototype and the related testing facility were entirely developed at the laboratory (see figures below)
Feasibility Study of a small-scale Technology Demonstrator of CIRA-PRORA SRT (Sub-Orbital Re-entry Test)
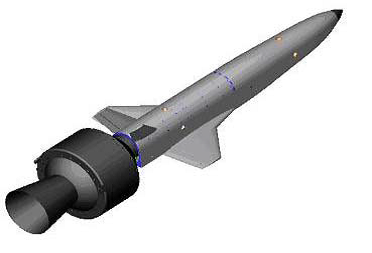
The project was aimed at the definition of a small-scale technology demonstrator (see concept in the figure) of a Sub-Orbital Reentry test mission planned by CIRA within PRORA (National Program for Aerospace Research). The project was funded by CIRA and conducted in cooperation with Polytecnic of Turin and the University of Rome "La Sapienza" with focus on mission analysis and guidance, navigation and control aspects.
Bystatic Mission "SABRINA" (System for Advanced Bistatic and Interferometry Applications)
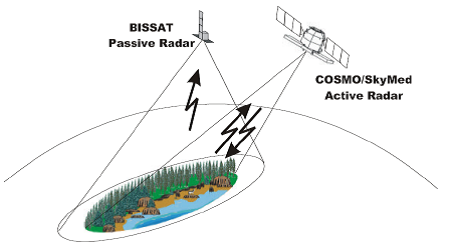
The project, funded by ASI and leaded by Thales Alenia Space, was aimed at the preliminary design of a Bystatic SAR (Synthetic Aperture Radar) mission (named SABRINA) based on a small satellite (BISSAT) flying in formation with a COSMO/SkyMed satellite (concept in the Figure). Study focus was on mission and system design aspects as well as on technologies for highly precise relative positioning of formation flying satellites. This project is conducted also in cooperation with the Second University of Naples (Contac: Prof. Marco D'Errico, marco.derrico@unina2.it).
Feasibility Study and Performance Assessment of an Integrated AIS-Cosmo/SkyMed System for Maritime Surveillance

The research project is carried out in the framework of PNRM (National Plan for Military Research) in collaboration with Centro Interforze Telerilevamento Satellitare (CITS). It focuses on maritime surveillance by using COSMO/SkyMed constellation to detect ships, adequately supported by in-situ information to select legal ships and identify potential alarms. The ultimate goal of the project is developing, implementing, testing and finally verifying a certain number of ship and ship-wake detection algorithms on COSMO/SkyMed real data, with the aim to integrate them in an automatic system able to estimate ship position and route (velocity and heading). Moreover, the identified ships are classified as “collaborative” or “no-collaborative” thanks to synergic exploitation of satellite data and in-situ collected data, which could be provided by the Automatic Identification System (AIS), the coastal vessel traffic system developed by the International Telecommunications Union. Figure below ilustrates the system concept.
Innovative Techniques For Autonomous Micro-Uav Swarms

This project is conducetd in the framework of the STAR Program supported by Universtità di Napoli "Federico II" with the financial contribution of Compagnia di San Paolo and Istituto Banco di Napoli - Fondazione. It aims at developing advanced guidance navigation and control technologies for autonomous micro-UAV swarms (see Figure) for indoor and outdoor surveillance applications
| Available Instrumentation |
|
The laboratory is equipped with the following instrumentation:
|
| Collaborations |
|
The team cooperates with several national and international partners.
|
| Team Publications |
| A list of the team publications is available at the institutional web sites of the staff members. |